








Назначение, общее устройство, тактико – технические характеристики, особенности эксплуатации мобильного роботизированного комплекса разведки и пожаротушения МРК-РП, мобильной роботизированной установки пожаротушения МРУП-СП-Г-ТВ-У-40.
Основные требования техники безопасности при работе с робото техническими средствами (РТС).
Термины и определения
робототехническое средство (РТС) – средство, которое выполняет функции, предписанные виды работ или операции без непосредственного участия человека в опасной зоне.
мобильный робот (МР) – дистанционно управляемое оператором самоходное робототехническое средство.
мобильный робототехнический комплекс (МРК) – совокупность мобильного робота, системы дистанционного управления и средств обеспечения эксплуатации робота.
Назначение, общее устройство, тактико – технические характеристики, особенности эксплуатации автомобиля быстрого реагирования АБР-РОБОТ(4326) – 25 минут.
Автомобиль быстрого реагирования для проведения аварийно-спасательных работ и пожаротушения в условиях повышенной опасности с использованием мобильного робототехнического комплекса легкого класса МРК-РП собран на шасси КАМАЗ-4326.
АБР-РОБОТ предназначен для:
– доставки мобильного робототехнического комплекса (МРК) и дополнительного оборудования к месту проведения аварийно-спасательных работ и пожаротушения;
– доставки персонала, способного, обслуживать и управлять робототехническим средством;
– доставки к месту выполнения работ расчета, пожарно-технического вооружения и запаса огнетушащих веществ;
АБР-РОБОТ соответствует климатическому исполнению УХЛ (эксплуатации при температуре воздуха от -40ºС до +40ºС), категории размещения 1 (для эксплуатации на открытом воздухе) эксплуатации в атмосфере типов 1 и 2 (условно чистой и промышленной) по ГОСТ15150 с размещением в период ожидания в помещении с температурой воздуха +5ºС.

| 1.2.1. Шасси – КАМАЗ-4326 | |
| 1.2.2. Колесная формула | 4 х 4 |
| 1.2.3. База, мм | 4200 |
| 1.2.4 Двигатель – КАМАЗ-740.31-240 (Евро-3) | |
| 1.2.4.1. Тип двигателя – дизельный с турбонаддувом | |
| 1.2.4.2. Мощность двигателя, кВт (л.с.) | 165(225) |
| 1.2.4.3. Частота вращения при номинальной мощности, мин -1 | 2200 |
| 1.2.5. Напряжение бортовой сети, В | 24 |
| 1.2.6. Тип колес | дисковые |
| 1.2.7. Тип шин – пневматические, с регулируемым давлением | |
| 1.2.8. Размер шин 425/85 R21 (1260[425-533Р) | |
| 1.2.9. Полная масса автомобиля, кг | 11600 |
| 1.2.10. Распределение нагрузки:
– на переднюю ось, кг – на заднюю ось, кг |
5600 6000 |
| 1.2.11. Углы свеса при полной нагрузке, град: | |
| передний – | 36 |
| задний – | 27 |
| 1.2.12. Дорожный просвет при полной нагрузке, мм – | 385 |
| 1.2.13. Максимальная скорость движения, не менее, км/ч | 90 |
| 1.2.14. Габаритные размеры, мм, не более: | |
| – длина | 7630 |
| – ширина | 2490 |
| – высота автомобиля | 3200 |
| Остальные технические характеристики см. в руководстве по эксплуатации изготовителя шасси. | |
| 1.2.15. Число мест боевого расчета | 2+3 |
| 1.2.16. Время подготовки к работе, ч, не более: | |
| – летом | 1 |
| – зимой | 1,5 |
| 1.2.17. Время свертывания, ч, не более | 2 |
Вывозимый пожарный инструмент и аварийно – спасательное оборудование
| № п/п | Наименование | Кол-во |
| 1. | Комплекс мобильный робототехнический легкого класса МРК-РП | 1 шт. |
| 2. | Установка пожаротушения тонкораспыленной водой УПТВ-300 с катушкой навесной и с рукавом высокого давления диаметром 17.4 мм на 50 м. | 1 компл. |
| 3. | Комплект дополнительного оборудования к МРК-РП в составе: | 1 компл. |
| – модуль порошкового пожаротушения вместимостью 50л | 2 шт. | |
| – модуль водопенного пожаротушения вместимостью 50 л. | 2 шт. | |
| – измеритель мощности дозы ИМД-21Б | 1 шт. | |
| – газосигнализатор ГСА-3 | 1 шт. | |
| 4. | ЗИП к МРК-РП в соответствии с ведомостью ЗИП | 1 компл. |
| 5. | Автомобильная УКВ радиостанция | 1 компл. |
| 6. | Носимая УКВ радиостанция | 2 шт. |
| 7. | Сигнальная громкоговорящая система | 1 шт. |
| 8. | Осветительный комплект | 1 шт. |
| 9. | ФОС с АЗУ | 1 шт. |
| 10.
|
Комплект аварийно-спасательного оборудования принятого в системе МЧС России в составе: | 1 компл. |
| – кусачки КГС-80 | 1 шт | |
| – ножницы комбинированные НКГС-80; | 1 шт. | |
| – расширитель средний РСГС-80; | 1 шт. | |
| – насосная станция СГС-1-80ДХМ; | 1 шт. | |
| – цилиндр двойного действия двухсторонний ЦГС-2/80; | 1 шт. | |
| – насос ручной НРС-2/80; | 1 шт. | |
| – катушка-удлинитель однорядная КУС-1/15 | 1 шт. | |
| 11. | Пеногенератор ГПВК | 1 компл. |
| 12. | Мотопомпа с возможностью водозабора от внешнего источника с производительностью 600 л/мин. | шт. |
| 13. | Огнетушитель ОУ-5 | 1 шт. |
| 14. | Огнетушитель ОП-5 | 2 шт. |
| 15. | Рукав пожарный напорный Dу =51 мм длиной 20 м | 5 шт. |
| 16. | Ствол ручной универсальный комбинированный | 1 шт. |
| 17. | Колонка КПА | 1 шт. |
| 18. | Теплоотражательный костюм ТК-800 | 3 шт. |
| 19. | Специальный костюм «РЗК» | 3 шт. |
| 20. | Специальный костюм «ТАСК-М» | 3 шт. |
| 21. | Дыхательный аппарат «Профи» | 5 шт. |
| 22. | Медицинская аптечка автомобильная | 1 шт. |
| 23. | Медицинская укладка | 1 шт. |
| 24. | Санитарные носилки облегченные | 1 шт. |
| 25. | Знак аварийной остановки | 1 шт. |
| 26. | Противооткатные упоры | 2 шт. |
| 27. | Лопата штыковая | 1 шт. |
| 28. | Кувалда | 1 шт. |
| 29. | Крюк для открывания люков | 1 шт. |
| 30. | Веревка | 1 шт. |
| 31. | Топор | 1 шт. |
| 32. | Лом пожарный с шаровой головкой | 1 шт. |
| 33. | Лом пожарный универсальный | 1 шт. |
| 34. | Трос буксировочный из стального каната грузоподъемностью 8-10 т. | 1 шт. |
| 35. | Канистра для бензина 5 л. | 1 шт. |
| 36. | Ножницы диэлектрические | 1 шт. |
| 37. | Перчатки диэлектрические | 1 пара |
| 38. | Боты диэлектрические | 1 пара |
| 39. | Коврик диэлектрический | 1 шт. |
| 40. | Зажим 80 | 1 шт. |
| 41. | ГП 50х70 | 1 шт. |
| 42. | ГП 50х80 | 1 шт. |
| 43. | ГП 70х80 | 1 шт. |
| 44. | Ключ К-80 | 1 шт. |
| 45. | Ключ К-150 | 1 шт. |
| 46. | Комплект шоферского инструмента | 1 компл. |
Устройство и работа АБР-РОБОТа и его составных частей
АБР-РОБОТ оборудован закрытой цельнометаллической однорядной 3-х местной кабиной (основная кабина) (поз.1) и однорядной 4-х местной дополнительной кабиной «салонного типа» (поз.2), где оборудовано рабочее место оператора МРК.
Основная кабина расположена над двигателем и для обеспечения доступа к нему опрокидывается вперед. Дополнительная кабина расположена непосредственно позади основной кабины и закреплена на надрамнике. Для облегчения опрокидывания основной кабины предусмотрено наличие гидравлического подъемника
На рабочем месте оператора МРК монтируется пульт управления мобильным роботом (МР).
Надстройка (поз.3) предназначена для доставки МР, различных приборов и пожарно-технического вооружения (далее ПТВ) к месту назначения.
Надстройка является конструкцией каркасного типа, установленной на подрамнике и закрепленной на нем с помощью металлорезиновых подушек.
Каркас надстройки, сварен из черного металла и обшит листом из алюминиевого сплава.
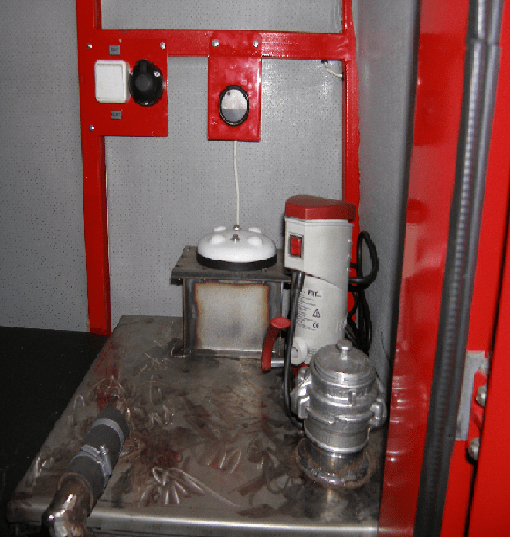
Цистерна (рисунок 2) предназначена для перевозки специальных растворов и воды, необходимой для тушения возгораний. Цистерна представляет собой сварную конструкцию из стали со специальным покрытием.
Для наполнения цистерны водой от внешнего источника предназначена горловина с гайкой ГМ50 (поз. 3).
Опорожнение цистерны производится посредством электрического насоса (поз. 2), который подключается к розетке 24В с выключателем (поз. 5).
Для определения уровня содержимого цистерны используется флюдометр (поз. 1), показания которого отображаются на индикаторе (поз. 4).
Из крышки цистерны выходит труба перелива (поз. 6).


Для погрузки (выгрузки) МР предназначен выдвижной трап (рисунок 12).
Для аварийной загрузки МР в настройке устанавливается ручная лебедка.
на крыше автомобиля размещены:
-трос буксировочный ;
-пеногенератор ГПВК;
– проблесковые маяки.
На дополнительной кабине снаружи (рисунок 13) смонтирована выдвижная стойка поз 1. для крепления антенн и коммутационная коробка поз. 2 с разъемами для подключения антенн.

Мобильный роботизированный комплекс разведки и пожаротушения МРК-РП
Назначение МРК
Мобильный робототехнический комплекс разведки и пожаротушения (далее МРК), предназначен для применения при ликвидации последствий аварий, отягощенных химическим и радиационным загрязнением, сопряженных с рисками гибели и травматизма личного состава.
Технические характеристики
| Масса снаряженного МР, не более кг | 190 |
| Максимальная скорость передвижения МР, не менее, км/ч | 3,0 |
| Высота преодолеваемого МР порогового препятствия, м | 0.25 |
| Допустимый угол крена, дифферента МР, не более, градус | 35 |
| Глубина преодолеваемой МР водной преграды, не более, м | 0.1 |
| Глубина преодолеваемого МР снежного покрова, не более, м | 0.1 |
| Номинальная грузоподъемность манипулятора, кг | 30 |
| Предельно допустимая грузоподъемность манипулятора, кг | 50 |
| Управление МР с ПУ на расстоянии:
– по кабелю, м, до – по радио на открытой местности, м, до |
200 1000 |
| Габаритные размеры МР, не более, м | |
| Длина | 1.35 |
| Ширина | 0.65 |
| Высота | 0.7 |
| Время непрерывной работы, ч, не менее | 4 |
К основным задачам, которые выполняет МРК-РП, относятся:
• подача в очаг возгорания огнетушащего вещества от водопенного или порошкового модуля пожаротушения;
• подача в очаг возгорания тонкораспыленной воды от
АБР-РОБОТ через 50-ти метровую катушку по рукаву высокого давления;
• подача в очаг возгорания воздушно-механической пены низкой кратности от АБР-РОБОТ через 50-ти метровую катушку по рукаву высокого давления или пены высокой кратности через пожарный рукав с использованием генератора пены высокой кратности (ГВП), закрепленного на манипуляторе МРК-РП;
• проведение аварийно-спасательных работ с применением манипулятора, механического схвата и комплекта сменных губок;
• проведение разведки в труднодоступных местах с преодолением препятствий (лестничные марши, коридоры, проемы и др.)
Устройство МРК
Мобильный робототехнический комплекс представляет собой набор механизмов, устройств и приспособлений, предназначенных для выполнения оперативно-тактических задач.
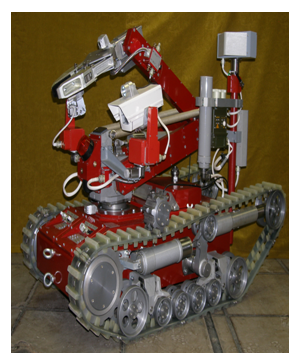
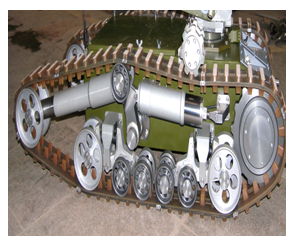
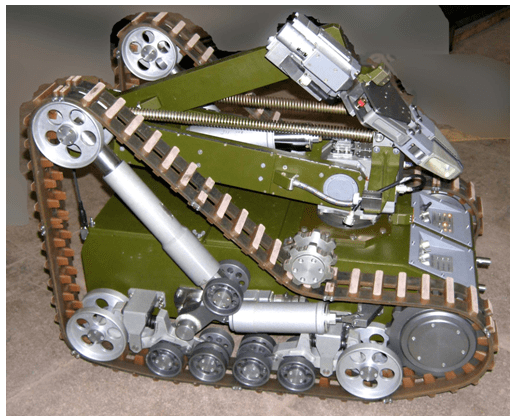
Основным элементом МРК является мобильный робот (МР), общий вид которого представлен на рисунке 1. МР представляет собой транспортное средство (поз. 1), внутри корпуса которого размещены: отсек управления с блоками системы управления, бортовая часть канала связи (закрыт крышкой поз. 2) и система энергообеспечения – отсек аккумуляторный (закрыт крышкой поз. 3). На корпусе транспортного средства монтируется манипулятор (поз. 4) и сменное технологическое оборудование, подключаемое к МР на панелях управления (поз. 5).
МР оснащен телевизионной системой, системой освещения и каналом акустической связи. Все исполнительные механизмы – электромеханического типа с двигателями постоянного тока.
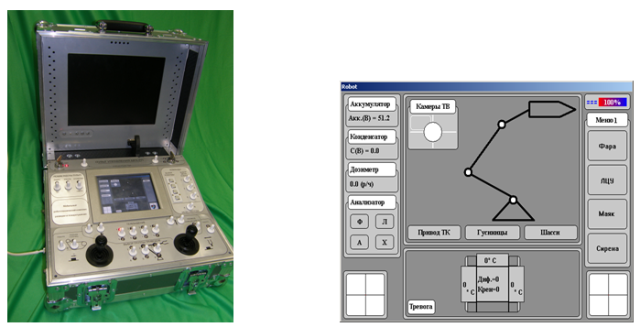
МР управляется в командном режиме с поста дистанционного управления (рисунок 15).
Система дистанционного управления (далее – СДУ) предназначена для дистанционного управления исполнительными механизмами и устройствами, входящими в состав МРК. Управление МР осуществляется по радиоканалу или кабелю в зависимости от условий работы.
Конструктивно СДУ делится на пультовую и бортовую части.
Пультовая часть СДУ, расположенная в ПУ, предназначена для задания команд управления, формирования командных посылок и преобразования их в код, удобный для передачи по кабелю и радиолинии. Задание команд управления осуществляется с помощью ручек управления, переключателей и кнопок, расположенных на панели управления.
Бортовая часть СДУ, расположенная в корпусе транспортного средства МР, предназначена для приема сигналов управления, поступающих, в зависимости от режима работы, по радиолинии или по кабелю, их обработки, усилению и распределению по соответствующим исполнительным устройствам и механизмам.
Для работы в условиях сложных для прохождения радиоволн (работа в зоне радиотени или работа с постановщиком радиопомех) СДУ снабжена бортовой катушкой с кабелем дистанционного управления, которая устанавливается на стойке в задней части МР (рисунок 12).
Для визуального контроля за работой МР МРК оснащен телевизионной системой.
Телевизионная система
Телевизионная система включает в себя:
– две обзорные телеустановки (ОТУ1, ОТУ2), выполняющие функции наблюдения за окружающей обстановкой;
– одну курсовую ТВ-камеру (ТК5), выполняющую функции наблюдения за дорогой в непосредственной близости от мобильного робота и положением гусениц по отношению к проезжей части дороги и их состоянием;
– одну прицельную ТВ-камеру (ТК3), позволяющую вести наблюдение за работой схвата и наведением рабочего инструмента на исследуемые предметы.
Все обзорные ТВ-камеры (ТК1, ТК2, ТК6), входящие в телеустановки ОТУ1 и ОТУ2,– цветные с широкоугольным объективом. Одна обзорная камера (ТК1) снабжена трансфокатором, позволяющим производить приближение (увеличение) изображения.
Обзорные ТВ-камеры (ТК1, ТК2, ТК6) установлены на двухстепенные механизмы наведения, позволяющие вести практически круговое наблюдение. Механизмы наведения ОТУ1 и ОТУ2 одинаковые, обеспечивают плавное пропорциональное (в зависимости от угла отклонения джойстика на пульте управления) изменение скорости наведения ТВ-камер – в вертикальной и горизонтальной плоскостях.
Максимальная скорость наведения ТВ-камер (ТК1, ТК2, ТК6) по горизонту и вертикали составляет 10º/с.
Курсовая ТВ-камера (ТК5) – цветная с широкоугольным объективом без трансфокатора, жестко установлена в передней части мобильного робота.
Прицельная ТВ-камера (ТК3)– черно-белого изображения без трансфокатора, жестко установлена на кисти мобильного робота.
Управление телевизионной системой осуществляется дистанционно с ПУ, а визуальная информация о работе МР отображается на мониторе ПУ.
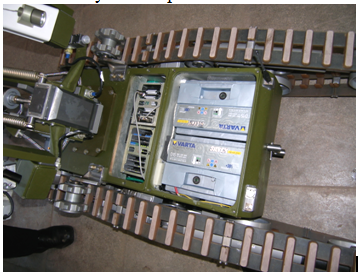
В качестве автономного источника питания (АИП-1) для МР применяются два автомобильных аккумулятора напряжением 12 В и емкостью 72 А/ч каждый, расположенные в МР (поз. 1, рисунок 2). АИП-1 предназначены для обеспечения работы ходовых двигателей МР, исполнительных механизмов и электронных блоков бортовой части СДУ, ТВ-системы МР.
АИП-1 обеспечивают непрерывную работу МР в течение 4-х часов.
Длительность непрерывной работы зависит от циклограммы выполнения работ МРК. Наиболее энергоемкими являются передвижения МР, особенно с частым маневрированием и движением в гору.
Работа МРК
Работу МР и ПУ, рассмотрим по функциональной схеме (рисунок 3).
Управление МР осуществляет оператор с ПУ поста дистанционного управления. Возможно управление, как по кабельной линии связи, так и по радио. Режим управления – командный.
Команды управления задаются оператором на ПУ ПДУ путем нажатия на соответствующие ручки, тумблеры, кнопки и переключатели на панели управления.
Сигналы пропорционального управления поступают в канал управления пульта на аналого-цифровой преобразователь, который преобразует их в цифровой код.
Команды дискретного управления поступают на микропроцессорный модуль пультовой части канала дистанционного управления, который формирует командные посылки в цифровом виде, удобном для передачи по кабельной линии связи и по радио.
В зависимости от режима работы МРК “Радио” или “Кабель” цифровой сигнал управления поступает на радиопередатчик канала дистанционного управления (радиомодем) или в кабельный канал связи соответственно.
В зависимости от режима работы “Радио” или “Кабель” на микропроцессор бортовой части канала дистанционного управления поступают цифровые сигналы управления от радио приемника или с примника-передатчика по витой паре. Сигналы управления, прежде чем поступить на соответствующие объекты управления (двигатели транспортного средства, манипулятор, фары, коммутатор телевизионных сигналов, дополнительное оборудование), поступают на блоки управления по шине CAN, где происходит соответствующее усиление сигналов по напряжению и по току.
Необходимую информацию для выполнения работ оператор получает с помощью телевизионной системы, канала акустической связи и дополнительно устанавливаемых на борту МР датчиков (в комплект МРК не входят). Видеоизображение в виде электрического видеосигнала от пяти телекамер поступает на коммутатор телевизионных сигналов, расположенный в блоке управления телевидением бортовой части СДУ. С коммутатора сигнал от выбранной камеры поступает или на передатчик телевизионных сигналов или на передатчик по витой паре (при работе МРК по кабелю).
Движение МР осуществляется моторами-звездочками, приводящими в движение гусеницы. Для повышения проходимости и маневренности предусмотрено изменение геометрии гусеничных обводов транспортного средства. Изменяя направление вращения моторов-звездочек, можно менять направление движения МР.
Погрузочно-разгрузочные работы осуществляются манипулятором, имеющим пять ориентирующих степеней подвижности: вращение относительно вертикальной оси, подъем плеча, качание предплечья и конечного звена, ротация схвата. Каждое движение осуществляется с помощью отдельных электромеханизмов.
Мобильный робот
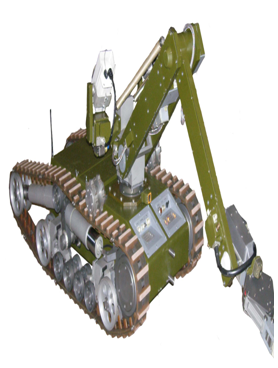
МР представляет собой самоходное, управляемое дистанционно, гусеничное транспортное средство с манипулятором, бортовой частью системы управления и телевизионной системой, оснащаемое дополнительным сменным оборудованием, состав которого меняется в зависимости от выполняемой задачи.
Управление МР осуществляется по кабелю или по радио.
При вращении моторов-звездочек обоих бортов в одном направлении МР совершает прямолинейное движение.
При вращении моторов-звездочек левого и правого бортов в разных направлениях происходит поворот МР на месте. При повороте направо (налево) правая (левая) гусеница движется назад, левая (правая) – вперед.
При прекращении движения МР происходит динамическое торможение электродвигателей моторов-звездочек.
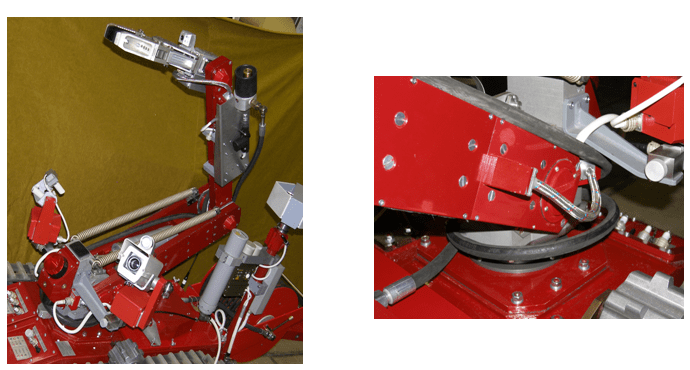
Манипулятор
Манипулятор состоит из опорно-поворотного устройства (поз. 1), плеча (поз. 2), предплечья (поз. 3) и кисти (поз. 4).
Кисть (рисунок 12) состоит из схвата (поз. 3) , механизма ротации (поз. 1) и механизма сжатия-раскрытия губок схвата (поз. 2). Угол вращения схвата не ограничен.
Манипулятор имеет токоподвод для подключения телекамер и исполнительных устройств, устанавливаемых на (в) схвате, а в конструкции кисти установлено вращающееся контактное устройство с восьмью контактными кольцами.
Манипулятор имеет пять ориентирующих степеней подвижности:
– поворот манипулятора вокруг вертикальной оси;
– качание плеча;
– качание предплечья;
– качание кисти;
– ротация схвата.

Комплект сменных губок схвата
Комплект сменных губок схвата предназначен для обеспечения надежного захвата предметов различной формы и размеров.
Комплект сменных губок схвата состоит из:
а) плоских прямых губок, установленных штатно на кисти манипулятора для захвата рабочего оборудования и плоских предметов;
б) узких удлиненных губок для захвата мелких предметов, расположенных в щелях шириной 20 мм и более, глубиной до 200 мм и отверстиях диаметром 40 мм и более;
в) губок типа грейфер с диаметром внутренней полости 160 мм;
г) губок для захвата цилиндрических предметов диаметром от 50 до 200 мм
Основой комплекта являются губки схвата прямые с колодкой, которые состоят из колодки с фиксатором и прямых губок. Все губки комплекта имеют унифицированное посадочное место. Выбранный комплект губок вставляется в посадочное место и фиксируется в выбранном положении.

Дистанционное управление осуществляется с пульта по радиоканалу или по кабельной линии управления.
Дальность работы составляет, м:
– по радиоканалу до 1000;
– по кабелю до 200.
СДУ защищена от влияния непреднамеренных помех промышленного и атмосферного характера, а также помех, вызываемых работой элементов МРК.
Бортовая часть СДУ выполняет следующие задачи:
– прием управляющих команд по радиоканалу и по кабелю;
– передачу ТВ-изображений с телекамер и телеметрии по радиоканалу и по кабелю;
– управление скоростью движения и поворота МР;
– пропорциональное управление двухстепенным устройством наведения ТВ- камер обзора;
– управление пятью приводами МП;
– включение-выключение телевизионных камер;
– пропорциональное регулирование усилия сжатия схвата;
– включение-выключение осветителей;
– включение-выключение светового маяка и звукового сигнала;
– отработку команд по управлению объективом-трансфокатором;
– отработку команд по переходу управления с «Радио» на «Кабель»;
– отработку команд по приведению в действие дополнительного оборудования;
– передачу по каналу телеметрии информации о состоянии боевой цепи срабатывания спецсредств, величине зарядки бортовых аккумуляторов, углах крена и дифферента, данных с приборов разведки;
– выдачу команд приведения в действие систем пожаротушения и охлаждения МР.
В случаях, когда управление по радиоканалу затруднено или невозможно в результате действия внешних электромагнитных возмущающих факторов, используется кабельное управление МР при помощи катушки кабельной линии управления (далее – КЛУ). КЛУ обеспечивает передачу команд управления с ПУ на борт МР, передачу команд приведения в действие спецсредств и приём ТВ-сигналов с борта МР на ПУ.
КЛУ обеспечивает размещение и свободное наматывание и сматывание кабеля управления длиной до 200 метров.
Пульт управления.
Пульт управления предназначен для формирования команд дистанционного управления мобильным роботом, получения телевизионного сигнала от телекамер и отображения телеметрической информации, поступающей с мобильного робота.
Формирование команд осуществляется с помощью органов управления панели пульта. Управление работой робототехнического комплекса осуществляется по кабелю или по эфиру.
Пульт управления осуществляет управление навесным оборудованием и обрабатывет и отображает сигналы телеметрии от мобильного робота.
Сигналы телеметрии робототехнического комплекса отображаются на дисплее панели управления и имеют как графическое, так и цифровое отображение.
На дисплей панели управления выводится схема робототехнического комплекса с телеметрическими данными о состояния различных устройств и механизмов робототехнического комплекса и состояние активных органов управления.
Панель управления формирует команды управления:
– определяет режим работы пульта управления – радио или кабель;
– выбирает активное звено (манипулятор) робототехнического комплекса;
– выбирает активную телекамеру робототехнического комплекса;
-осуществляет пропорциональное управление скоростью звеньев робототехнического комплекса и движением;
– формирует дискретные команды управления для навесного оборудования робототехнического комплекса;
– формирует команды управления транспортным средством.
Формирование команд управления МР производится органами управления с использованием тумблеров, кнопок и джойстиков.
Панель пульта разбита на функциональные зоны управления:
– режим работы пульта;
– телевидение;
– выбор группы приводов;
– выбор команд;
– выбор меню команд.
Каждая зона управления формирует соответствующие команды управления.
Применение АБР-РОБОТ и МРК-РП при ликвидации возможных
пожаров (загораний) и аварийных ситуаций на охраняемых объектах
ОАО «Уральский электрохимический комбинат»
Проведение разведки места пожара (аварии) при помощи телевизионных систем, приборов радиационной и химической разведки МРК-РП.
Осаждение газообразного облака гексафторида урана (ГФУ) в случае выброса на конденсационно-испарительных участках (КИУ) подразделений основного производства при помощи установки пожаротушения тонкораспылённой водой УПТВ-300 и МРК-РП.
Тушение загораний на ядерноопасных участках подразделений основного производства и закрытых распределительных устройствах энергообъектов при помощи МРК-РП с модулем порошкового пожаротушения
Тушение загораний на ядерноопасных участках подразделений основного производства и закрытых распределительных устройствах энергообъектов при помощи МРК-РП с присоединённой рабочей рукавной линией диаметром 38 мм (51 мм) с ручным универсальным стволом для подачи «сухой» компрессионной пены, подаваемой от автомобиля пожарного специального тушения NATISK.
Проведение развёртывания сил и средств в условиях возможного взрыва технологических аппаратов (установок), например: транспортировка и установка на позиции переносного лафетного универсального пожарного ствола АКРОН «Mercury-Master 1000тм» массой 10,5 кг, прокладка магистральной рукавной линии и её присоединение к лафетному стволу.
Указание мер безопасности
К работе с МРК допускаются только обслуживающий персонал, прошедший подготовку в специальном учебном центре и имеющий удостоверение на право управления и работы с МРК и прошедший инструктаж по технике безопасности.
В целях надежной работы изделия и безопасности обслуживающего персонала необходимо соблюдать общие правила техники безопасности, установленные на месте эксплуатации изделия. Применять изделие допускается только в соответствии с назначением, указанным в РЭ.
При работе с использованием дополнительного оборудования не входящего в состав МРК необходимо соблюдать требования безопасности, изложенные в руководствах по их эксплуатации на это оборудование.
Необходимо соблюдать осторожность при работе с зарядным устройством, входящим с состав изделия, так как используется входное напряжение ~ 220 В с частотой 50 Гц. Во избежание несчастных случаев требуется соблюдение общих мер безопасности от поражения обслуживающего персонала электрическим током.
Запрещается применять в зарядном устройстве предохранители изготовленные из проводников диаметром больше допустимого для каждого типа ЗУ. Перед заменой предохранителя в ЗУ не забудьте вынуть вилку из розетки электросети.
Во время зарядки АИП запрещается вскрывать изделие, производить ремонтные и профилактические работы, а также проверять работоспособность изделия.
При проверке функционирования МРК запрещается находиться ближедвух метров к МР, проверять качество стыковки соединителей при включенных приводах.
Изделие не представляет опасности для жизни и здоровья человека и окружающей среды при соблюдении правил эксплуатации, хранения и транспортирования, изложенных в РЭ.
Внимание! При зарядке аккумуляторов возможно образование взрывоопасной смеси. Зарядку проводить в хорошо проветриваемом помещении. Зарядку аккумуляторов МР проводить только при снятой крышке аккумуляторного отсека.
Работа с установкой пожаротушения тонкораспыленной водой
Для проведения работ с использованием установки пожаротушения тонкораспыленной водой УПТВ-50, катушка с рукавом высокого давления навешивается на МР (поз. 1, (рисунок 29), распылитель поз. 1 (рисунок 30) устанавливается на звене манипулятора и они подключаются к клапанной коробке поз. 3 (рисунок 29). Клапанная коробка подключается к разъему поз. 4.

рис 29
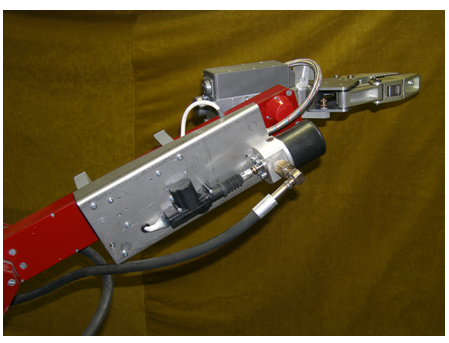
рис 30
Укладка шланга по манипулятору показана на рисунке 31.
Порядок работы с УПТВ-50 в ее руководстве по эксплуатации.
Для включения подачи воды на ПУ тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «3», в графическом окне монитора панели управления ПУ отобразятся команды «Меню 3».
Нажать кнопку напротив команды «Подача воды». Визуально наблюдать исполнение команды на МР. Управляю манипулятором направить струю на объект. Для изменения распыла струи нажать кнопку напротив команды «Компактная струя». Для отмены команд повторно нажать соответствующие кнопки.
Для охлаждения МР на клапанной коробке установлен распылитель (поз. 2 рисунок 29). Для включения режима охлаждения МР необходимо тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «2» и нажать кнопку напротив команды «Орошение». Визуально наблюдать исполнение команды на МР.
Работа с модулем водопенного пожаротушения
Порядок заправки водопенного модуля согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 32). Подключение модуля и работа с ним в составе МР согласно п. 3.4.2.4.

Работа с модулем порошкового пожаротушения
Порядок заправки порошкового модуля и соблюдения правил техники безопасности согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 33). Пиропатрон подключается кабелем к разъему «Оружие» (рисунок 27).
 Рисунок 33
Рисунок 33
Внимание ! Подключение проводить строго в следующей последовательности:
– свободные концы кабеля скруткой подключить к пиропатрону;
– при выключенном МР и выключенном тумблере (в нижнем положении) (поз. 10, рисунок 27) подключить кабель к разъему «Оружие»;
– включить МР;
– перевести тумблер в верхнее положение «I».
Для активации порошкового модуля необходимо на ПУ повернуть ключ «СПЕЦСРЕДСТВА» в положение «С2». Начнется зарядка боевых конденсаторов. Процесс зарядки контролировать по показаниям окна «Конденсаторы» (поз. 2, рисунок 20). При достижении значения зарядки 19…20В боевая цепь готова к работе. Нажатием двух тумблеров «ПУСК» (поз. 2 и 4, рисунок 21) инициировать порошковый модуль. Перед активацией МР повернуть в сторону объекта.
Вместо распылителя (поз. 1, рисунок 33) может устанавливаться успокоитель в схвате манипулятора и с помощью шланга подключаться к порошковому модулю. В зависимости от применяемого типа распылителя («елочка» или успокоитель) применяются различные марки порошков.
Работа с пеногенератором
Пеногенератор ГПВК устанавливается в схвате манипулятора (поз.1, рисунок 34).
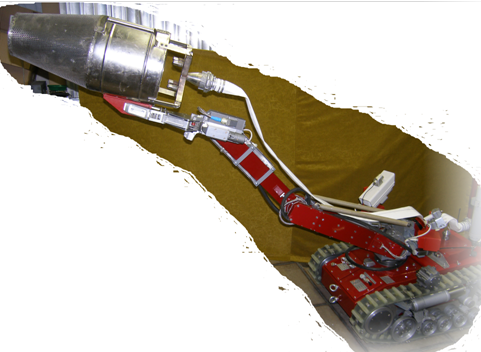
Рисунок 34
С помощью шланга подключается к фланцу переходнику, закрепленном на МР (рисунок 35).
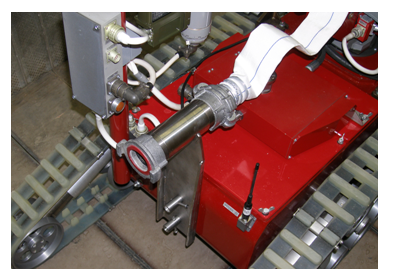
Рисунок 35
Подача раствора пенообразователя на пеногенератор осуществляется от внешнего источника по рукавной линии. В качестве внешнего источника может использоваться пожарный автомобиль, оснащенный пенно-баком и системой дозирования пенообразователя. Рабочее давление на пеногенераторе должно быть в диапазоне 4÷8 атм. при расходе 1л/с. Применяемый пенообразователь по своим характеристикам обеспечивает получение высокократной пены (более 200).
Направление подачи струи пены производится с помощью команд подаваемых на исполнительные механизмы манипулятора.